Checksums in ECU Tuning: How Modern Tuning Tools Handle Data Integrity
Modern engine control units (ECUs) are no longer simple lookup-table driven devices. They are distributed real-time control systems with multiple validation layers, redundancy mechanisms, cryptographic protections, and increasingly complex software architectures. Within this environment, the checksum is not merely a safety mechanism — it is a fundamental part of the ECU’s software integrity model.
In ECU tuning, every read, modification, and write operation interacts with this integrity model. Understanding how checksums function across different memory regions, processor architectures, and tuning workflows is essential for anyone working seriously with calibration files, full flashes, and software patching.
This article explores how modern tuning tools interact with ECU checksums, how different ECU platforms structure their validation logic, and why checksum handling is not a single operation but a layered system spanning calibration data, program code, and boot-level verification.
ch, the ECU assumes the data is invalid and reacts accordingly—ranging from limp mode to a complete no-start condition.
Importantly, checksums operate on raw binary data, not on interpreted values such as torque, lambda, or ignition timing. This means a file can be logically incorrect yet checksum-valid, or logically correct but rejected due to a checksum mismatch.
Why ECUs Use Multiple Checksum Blocks
Older ECUs often relied on a single checksum covering the entire software image. Modern ECUs do not. Instead, they use multiple checksum blocks, each responsible for a specific memory region.
The reasons are both technical and architectural:
-
Different memory areas serve different purposes
-
Calibration data changes more frequently than program code
-
Partial updates must still be verifiable
-
Runtime validation may differ from boot-time validation
As a result, an ECU may validate:
-
Calibration sections independently
-
Program code separately
-
Mode-specific or feature-specific regions (such as flex fuel or drive modes)
This layered approach allows the ECU to detect precisely where an inconsistency occurs, rather than treating the software as a single monolithic block.
Maps Area vs Program Area vs Full Flash
To understand checksum behavior in tuning, it is crucial to distinguish between memory regions:
Maps Area (Calibration):
This section contains tables, curves, and constants—boost targets, fuel maps, torque limits, and similar parameters. Many tuning operations focus exclusively on this area. Some tools automatically correct checksums only for this region.
Program Area (Code):
This includes control logic, state machines, safety routines, and validation algorithms. Program-level checksums are often stricter and may be validated during startup or continuously during operation.
Full Flash:
A full flash includes all memory regions: bootloader, program, and calibration. This provides maximum control but also maximum responsibility. Any checksum mismatch in any region can prevent the ECU from running, even if the calibration itself is correct.
This distinction explains why a file may flash successfully but result in a no-start condition: the write process completes, but one of the checksum blocks—often outside the maps area—fails validation.
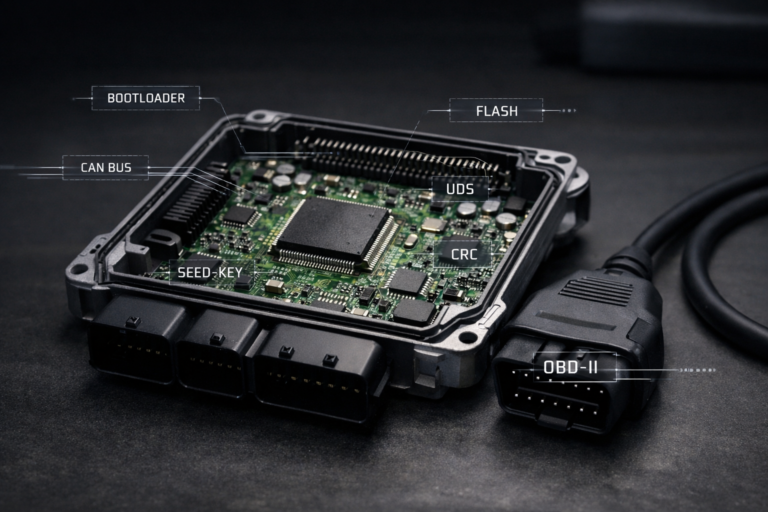
Checksum Handling in Common ECU Architectures
MED9, MED17, MG1, MD1, EDC17, Simos and Other Platforms
Each ECU family implements its own validation model:
-
MED9/MED17: Bosch gasoline ECUs with layered checksum logic
-
EDC17: Diesel ECUs with strong segmentation between code and calibration
-
MG1/MD1: Modern TriCore-based systems with enhanced security and validation
-
Simos: VAG-specific architectures with integrated torque model validation
The checksum algorithms themselves may be simple, but the orchestration of validation is complex.
OEM Strategies for Data Validation
OEMs design validation to prevent unintended behavior and unauthorized modification. The goal is not to prevent tuning per se, but to guarantee that any change is internally consistent.
This is analogous to consistency models in distributed systems: the ECU must ensure that all its internal representations of the software agree before executing control loops.
Bootloader-Level vs Application-Level Checksums
Bootloader checksums validate the application before execution. Application-level checksums validate calibration during runtime. Some ECUs also implement rolling or dynamic validation where memory is periodically rechecked.
How Tuning Tools Interact with Checksums
Read / Modify / Write Workflow
The tuning workflow is:
Each step interacts with the checksum model.
Automatic vs Manual Checksum Correction
Some tools automatically recalculate checksums during write operations. Others rely on external software (such as WinOLS checksum plugins) to correct checksums before writing.
OBD, Bench, and Boot Mode Implications
OBD writing often limits access to certain memory regions. Bench and boot mode allow full memory access, which increases flexibility but also increases responsibility for checksum correctness.
Tuning Tools Commonly Used in Checksum Workflows
In professional workflows, multiple tools coexist:
-
Alientech KESS3 and K-TAG
-
Autotuner (OBD, Bench, Boot)
-
CMDFlash and CMD Bench
-
bFlash
-
Dimsport New Genius and Trasdata
-
Magic Motorsport FLEX
-
PCMFlash
-
BitBox
-
Byteshooter
-
MPPS
-
FGTech Galletto
-
KT200
-
Tactrix OpenPort
-
Scanmatik
-
SM2 / SM2 Pro
-
EVC WinOLS with checksum plugins
Each of these tools participates in reading, writing, or validating ECU memory.
Role of WinOLS and Checksum Plugins in Professional Workflows
Why Checksum Plugins Exist
Checksum plugins encode ECU-specific validation logic. They allow the engineer to compute correct checksum values without reverse-engineering the algorithm.
Platform-Specific Checksum Modules
Examples include MED17, EDC17, MG1, MD1, and others. Each module corresponds to a family of ECUs and implements their internal consistency rules.
Interaction Between Editing Software and Flash Tools
Editing software modifies content; flash tools write content. The checksum correction may occur before or after writing, depending on the workflow.
Scaling, Data Representation, and Their Relation to Checksums
How Scaling Affects Map Interpretation
Scaling defines how raw binary values map to physical units:
y=a⋅x+b
Incorrect scaling does not affect checksums but affects interpretation.
Why Incorrect Scaling Does Not Break Checksums — But Breaks Tuning
Checksums operate on raw data, not on interpreted values. Therefore, scaling errors produce valid but incorrect calibrations.
Strategy-Based Calibration vs Value-Based Editing
Strategy-based calibration respects the internal control logic. Value-based editing treats maps as independent variables, which can violate internal consistency.
Automatic Transmissions, Torque Models, and Program-Level Validation
Torque Intervention and Limit Monitoring
Modern ECUs use model-based torque control. The ECU estimates torque based on airflow, lambda, ignition, and efficiency models.
Ceiling Values and Validation Logic
Ceiling limits are enforced to maintain physical and mechanical safety.
Differences Between Calibration Limits and Program Limits
Some limits are data; some are logic. The former are adjusted via maps, the latter via code.
Common Checksum-Related Issues Seen in the Field
File Writes That Succeed But Don’t Run
A write may succeed electrically but fail logically due to checksum mismatch.
Files That Run But Trigger Fault Codes
Partial checksum mismatches may allow operation but trigger diagnostics.
Cross-Tool Compatibility Scenarios
Files moved between tools may require revalidation.
Why Different Workflows Exist Across the Industry
OEM Complexity
OEM architectures evolve faster than tools.
Regulatory Constraints
Emissions and safety regulations influence ECU design.
Tool Vendor Design Choices
Vendors balance usability, legality, and technical complexity.
Future of Checksum Handling in ECU Tuning
Increasing Security and Validation Layers
Future ECUs incorporate cryptographic signatures.
Virtualization, Secure Boot, and Encrypted Calibrations
ECUs are becoming secure computing platforms.
Implications for Tuners and Tool Developers
Tuners must understand software engineering, cryptography, and control theory.
Conclusion
Checksum handling is not a checkbox operation. It is part of a layered integrity model that ensures the ECU behaves predictably and safely. Understanding this model is essential for professional calibration.
At EagleTuning, calibration work is treated as engineering, not file swapping. If a specific file, platform, or architecture requires analysis, validation, or structured development, that work can be supported when needed — because ultimately, modern ECU tuning is software engineering applied to physical systems.